RoboCup2017 Nagoya Japan(ロボカップ2017)



RoboCup2017 Nagoya Japan(ロボカップ2017)
ロボカップ・レスキューで評価されたロボットとその技術が
実際の災害現場の難題を乗り越えてきた
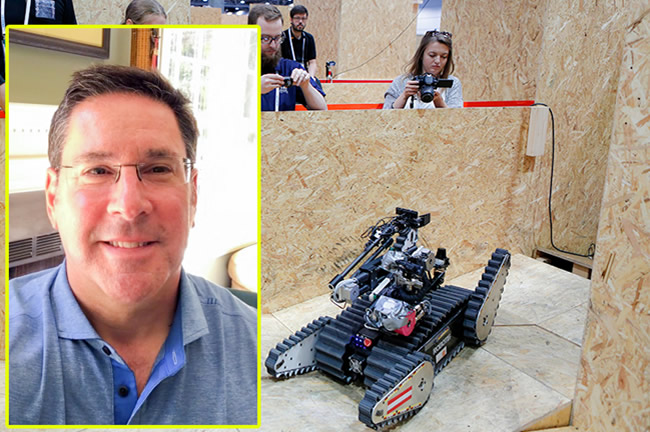
Adam Jacoff氏は、米国商務省の国立標準技術研究所(NIST : National Institute of Standards and Technology)でロボット技術の研究者として活躍しています。今まで様々な先進的なロボット開発に携わり、米国軍の実験用無人車両(XUV)の自律移動性における技術評価レベルの策定を行ったひとりでもあります。
Jacoff氏が現在取り組んでいる主な業務は、地上、水中、空中におけるロボットの能力を客観的に評価し、新しい技術を評価する、50項目に及ぶ標準的なテスト方法の開発、策定、そして確立です。
具体的に言えば、移動性、操作性、センシング性能、パワー/耐久性、人とロボットの相互作用などの機能や能力を測定するための「標準的なテスト項目」や「評価方法」を開発しています。
Jacoff氏はこの作業を行うのに、ロボカップ・レスキューリーグは欠かせない存在だと言います。
実際の災害現場で必要とされている課題がロボカップ・レスキューで試される
- NISTでの仕事とロボカップ・レスキューとの関わりを教えてください。
私達がNISTで評価基準を研究しているロボットは、地震やハリケーンなどの自然災害や火事、爆発、テロ事件など、緊急対応が必要な現場で捜索・救助活動を行うロボットたちです。
日本では2011年に発生した大震災によって、福島第一原子力発電所(以下、福島第一と表記)が大きな被害を受けました。福島第一のように、様々な要因によって人が近付くことが制限されている状況下では、現場の中に入って作業ができるのはロボットだけです。ロボカップ・レスキューで評価されたロボットはその能力を持っている可能性が非常に高いということです。
- NISTがロボットの能力を測定するための標準的なテスト項目と、ロボカップ・レスキューの競技課題は実質的に同じと言うことでしょうか。
災害現場に入っていくロボットには、危険な状況下において様々な能力が要求されるでしょう。それだけの能力を持ったロボットかどうか、さまざまな作業をこなすことができるロボットかどうかを前もって試験・検証する必要があります。
ロボカップのレスキューリーグで各チームに課せられている20項目もの課題には、NISTが考える試験項目が反映されています。そのため、ロボカップ・レスキューでこれらのテストメソッドに対して最もポイントを獲得できたロボットは、災害現場でも同様のミッションを実際にやり遂げる可能性が高いと評価されるのです。
- なるほど、ロボカップのレスキューリーグで良い成績を収めたロボットは実際の現場でも活躍できるに違いないということですね
今ではロボカップは国際的な大会なので、自分たちのロボットが実際の災害現場でどれたけ有効かを、全世界に対してアピールすることができます。
- ロボカップ・レスキューで注目されたロボットは、既に実際の災害現場で活躍しているのでしょうか?
はい。消防、警察、軍隊など、様々な分野で技術が活用されています。
例えば、福島第一の場合、対策のための研究施設が楢葉町で稼働しています。今年のロボカップで評価を受けたチームは、楢葉の施設で研究開発している人たちや東京電力の対策メンバーらと合流し、ロボットの技術情報を交換する機会を持つことになるでしょう。そこではロボカップで評価された自分たちのロボットがどのような機能や能力を持っているかを披露する場になります。そこで対策チームが新しい技術に興味を持てば、次のステップに進みます。福島第一の現場を模したモックアップ(アリーナ)が作られているので、ロボカップで評価を得たメソッドを再現します。そのモックアップはクリーンでクリアな状態ですが、福島第一の状況を完全に模したものであり、実際の現場でそのロボット技術が有効かどうかを検証することになります。これは重要な社会貢献であり、とても名誉なことでもあると思います。
- そう考えるとロボカップ・レスキューは実際の災害現場に横たわる重大な課題を解決するための「はじめの一歩」ということですね
更に具体的な実例として、千葉工業大学らが開発したロボット「クインス」(Quince)のケースを紹介します。クインスは福島第一に発生した災害の前年に、ロボカップ・レスキューで大きな評価を受けました。福島第一の内部調査のために遠隔操縦で導入されたクインスは現場の階段を上り、3Dマッピングを行って、みごと5階までたどりつくことができました。
このとき、クインスのほかに、様々な軍用ロボットが福島第一で同様のチャレンジを行いましたが、1階から上にはのぼることができませんでした。施設内には崩壊が起こっていて、膨大な量のホコリのため、金属製の階段は非常に滑りやすくなっていたからです。クインスはそのような状況でも4つの独立したフリッパーやボディチェッカーを駆使して階段を上ることができました。5階でクインスの前進を阻んだのは、階段に積まれた瓦礫でした。瓦礫をどかしたり、それらを乗り越えて進むというチャレンジが考えられましたが、練習すらしてこなかった作業を本番で行うというのは大きなリスクが伴う、という判断のもと断念しました。
我々にとっての次の課題は、階段の瓦礫を除去することになりました。こうして次のロボカップ・レスキューでの課題には「階段にある瓦礫をクリアする」という新たな項目を加わったのです。ロボカップに出場する研究者たちはきっとこの課題も乗り越えてくれると思います。
このようにして、実践で何かの難題が立ちはだかれば、ロボカップ・レスキューのメソッドに加えられ、それを乗り越える新たな技術開発に切磋琢磨するのです。こうして科学やロボットは進化していきます。


福島第一原発の現場にも導入されたクインス
ロボカップ・レスキューは人とロボットのチームワーク
- ロボカップ・レスキューではどのようなことが重要でしょうか
その答えはたくさんあります。例えば、モビリティ、器用さ(dexterity)、自律性(Autonomy)、マッピング、そして信頼性も重要です。
今年からモビリティにおいては新たなチャレンジとして「飛行するシステム」を導入します。キャタピラーなどで地上を移動するロボットと、ドローンなどの垂直離着陸機が連携すれば、新たなモビリティの可能性が見えてきます。最近はドローンがとても安価になってきたので、気軽に導入したり、参加することができると思います。課題は「誰でも簡単に操縦することができるか」ということでしょう。
ロボカップ名古屋世界大会では、安全ネットを貼ったドームでドローンの競技やキャタピラー型とコラボした種目が見られると思います。
- それは楽しみですね。「自律性」も挙げられましたが、レスキューロボットにとって、操縦性と自律性はどちらが重要でしょうか。
多くの災害現場では人の安全を確保するため、ロボットのオペレーター(操縦者)は遠く離れたところから遠隔で操作することになります。しかし、遠隔操作だけでなく自律性が有効なケースが数多くあります。ロボットに搭載しているコンピュータは人や物を見分けることができます。レーザースキャナを搭載したものはミリメートルのレベルで測定することも可能です。ロボットは自分自身のカタチやサイズも解っているため、目の前にある通路や扉を通り抜けられるのかどうかを的確に判断することができます。遠隔操作でオペレーターが目視したのでは正確性に欠ける場合があります。また、熱源をみて周囲の温度を予測したり、生存者を探すこともできます。このようにロボカップでは競技を通して自律性を直接測ることができます。ロボット自体が知性を持つ、オンボード・インテリジェンスはとても重要であり効果的です。
ただし、遠隔操作を通じて経験豊かな人の判断は時としてなによりも重要です。複数の扉やルートがある場合に、どちらを通るべきか? 幅や温度だけでなく、状況を見て、さまざまな複合的な要素から適切な判断が必要となるでしょう。
- 人とロボットの協働が大切ということでしょうか。
そのとおりです。ロボットとそれを遠隔操縦するオペレーターの間には距離があります。その距離を埋めることができるのはロボットの行動をバックグラウンドで支えている自律性です。
災害現場で救助犬を連れた人(ハンドラー)が捜索活動を行う光景を見たことがあると思います。救助犬とハンドラーはチームでまさに一体となって行動します。
ハンドラーは安全を考慮しながら、犬が最も能力を発揮できるように調整し、犬はその指示に従って自分が持っている能力を最大限活用して捜索救助にあたるのです。
ロボットとの関係もそれとまったく同じなのです。災害現場でもロボカップ・レスキューでも、ロボットができうる能力を最大限引き出せるよう、操縦者は判断し、運用、制御します。ある場面ではロボット自身の自律性で行動することも重要でしょう。このようにチームが一体となって協働することで、持っている能力が発揮できると感じています。
- 最後にロボカップに足を運んでくれる観客にメッセージをください。大会ではどんな点に注目したら良いでしょうか
ロボカップではジュニアからサイエンティストに至るまで、ひとつの継続性があることを見て欲しいと思います。
レスキューにはジュニアリーグが設けられていて、子どもたちも競技に参加しています。ジュニアリーグは30cmスケールの比較的小さなロボットを使って小規模なアリーナで競います。続いて一般のレスキューリーグでは120㎝スケールの大きなロボットが、大規模なアリーナで自分たちが研究してきた最新の技術を披露します。ドローンも見られるでしょう。
すべての参加者が研究した技術の先は、実際の災害現場に繋がっているということです。子どもから第一線で活動しているサイエンティストまで、参加者全員が福島の原発事故の問題を解決するための難題に挑み、一生懸命取り組んでいるということをぜひ見て欲しいと思います。
著者・撮影:ロボスタ 神崎洋治(http://robotstart.info/)

[ プロフィール ]
Adam Jacoff氏
Robotics research engineer in the U.S. Department of Commerce, National Institute of Standards and Technology (NIST), Engineering Laboratory, Intelligent Systems Division.

Global Sponsors

Global Partner
Platinum Sponsors



Gold Sponsors







Silver Sponsors















Bronze Sponsors





















Official Logistics Partner



ロボカップの動画はこちらから
記者会見の様子はこちらから

名古屋市のロボット工作教室情報はこちらから

ロボカップ2017名古屋大会事務局
((株)インターグループ内)
[E-mail] info@robocup2017.org
[TEL] 052-581-3241
〒450-0002
名古屋市中村区名駅2-38-2
オーキッドビル8F