RoboCup2017 Nagoya Japan(ロボカップ2017)



RoboCup2017 Nagoya Japan(ロボカップ2017)
レスキューリーグで競っているロボット技術が
実際の救助活動に役立つことを実感
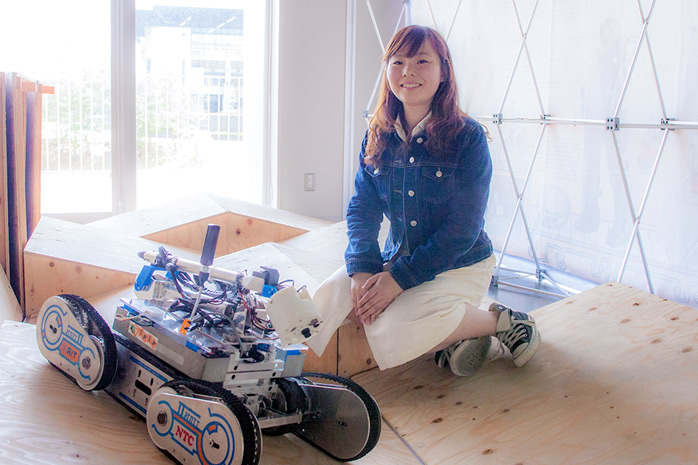
地元の消防署や災害救助活動プロジェクトとの交流も積極的に行っている渡邊さんは愛工大の博士後期課程1年。ロボカップレスキューのロボットリーグでは、昨年ドイツで開催されたライプツィヒ世界大会に出場、今年の名古屋世界大会にも出場予定です。ロボカップレスキューに必要な技術、課題、そしてその魅力について聞きました。
「やっぱりロボットがやりたい」 強い思いが背中を押した
- ロボット競技に出るようになったきっかけを教えてください。
きっかけはロボカップです。子どもの頃、父親に連れられてロボカップのジャパンオープン(日本大会)を観に行きました。そこでロボット競技を見て「いつか自分でもやりたい」と思いました。 中学生のときにも「自分でロボットを作りたい」と思い立ったのですが、周りには一緒にロボットをやりたいという友達は全然いませんでした。
- 残念ながら思いは叶わなかったのですね。
一緒にやる友達はいなかったのですが、当時ロボカップジュニアのプラットフォームで使われていたロボットキットをひとりで作って遊んでいました。高校は機械科に進んだのですが、そこでもC言語で簡単なゲームを作ったり、授業でも簡単なプログラミングはやっていたものの、ロボットは作りませんでした。
- 高校時代にロボカップジュニアに出場したわけでもなかったんですね?
参加しませんでした。ロボットを作りたいという気持ちはあったのですが、機会がなくて実現しませんでした。 「やっぱりロボットがやりたい」と強い思いを抱いたのは大学に進学してからです。その気持ちに背中を押されて奥川研究室に入り、レスキューロボットの研究をはじめました。日本国内には「レスキューロボットコンテスト」という大会があってそれに出場するようになりました。
ロボットが自律的にトリアージを行うアイディアで竸基弘賞を受賞
- ロボカップとは別の大会ですね。ロボカップのレスキューリーグとレスキューロボットコンテストとのちがいはなんでしょうか?
災害現場でロボットがレスキュー活動を行うという点ではロボカップとロボットコンテストでどちらも同じです。ただ、ロボカップレスキューでは災害現場を移動する走破性や人を発見する技術が主に求められるのに対して、レスキューロボットコンテストは現場に人の模型が何体か置かれていて、ロボットアーム等を使って助け出すことが要求されます。
- なるほど。レスキューロボットコンテストの成績はどうでしたか?
成績はパッとしませんでしたが(笑)、2013年に竸基弘賞(きそいもとひろしょう)を受賞しました。私達が研究していたロボットのコンセプトが評価されたようです。
- それは素晴らしい! どんなコンセプトですか?
要救助者(救助が必要な人)を救出する際、トリアージの判断をロボットが行うしくみを取り入れました。要救助者の人形は目が点灯したり、マーカーや音などを使って怪我や被害の状態が示されます。ロボットはそれを認識して重症の人を優先して搬送するしくみを私たちで作って搭載したのですが、それを評価して頂きました。うれしかったです。

- ロボカップのレスキューリーグにも出場した経験がありますよね?
はい。ロボカップのレスキューリーグには大学の4年生から出場しはじめて、2015年にロボカップジャパンオープンで優勝することができました。
- 素晴らしい実績ですね。その年はたしか、実際の災害現場でも用いられたロボットも出場していたと思いますが、強豪たちを破ってのジャパンオープン優勝だったということですね。それは偉業です。
ありがとうございます。走破性ではこのロボットは負けていないんだなと感じました。もちろん様々な点で強豪ロボットには劣っている部分があるかとは思いますが・・
- ジャパンオープン優勝者として、昨年ドイツで開催された世界大会にチャレンジしたわけですね。世界大会の結果はどうでしたか?
残念ながら決勝に進めませんでした。日本大会と世界大会ではコンセプトやロボットのサイズが違う点に戸惑いました。日本ではコンパクトなロボットでどこまでできるかということが求められる部分がありますが、世界大会ではもう一段新たな挑戦を行う必要があったと感じています。
- あらためてレスキューリーグの競技はどのようなものか、説明していただけますか?
レスキューリーグにもいくつかカテゴリーがありますが、私達は遠隔操縦で実機のロボットを操縦する部門に出場しています。競技としてはまず事前に基礎点を競います。基礎点とは、マイクやセンサー、マニュピレーターなど、基本的な性能をチェックします。例えば、QRコードを読んだり、人の呼気を検知するなど、センサー機器類の性能で採点されます。
[解説]
レスキューリーグの見どころは迷路のようなデコボコのコースがいくつか用意されていて、その中から競技者が選択して自分たちのロボットの性能を披露する走行テストです。ロボカップは勝ち負けではなく、自分たちの研究や開発の成果を評価してもらうことで順位が決定します。レスキューリーグの予選では模擬要救助員(人形)は配置されません。
走行テストの前に実施されるのが基礎点の審査です。ロボットの「6つの調査性能」と「4つの器用さ」を審査して基礎点を出し、走破性テストの得点に乗じたポイント方式となります。
6つの調査性能とは、ビデオ映像の解像度、動体検出、熱画像の解像度、聴力、色/パターン認識、ガス検知です。
4つの器用さとはInspect(直径5cm のパイプの内壁に描かれているバーの数を識別する)、Touch(パイプの端にある直径1cmの目標円に触る)、Rotate(5cmの八角形のパイプのふたを把持して180 度まわす)、Extract(5cmの八角形のパイプのふたを把持してパイプから引き離す)となっています。
- 国際大会で予選敗退だった原因は何だったのでしょうか?
基礎点と走破性を乗じたポイントが全体の評価点になりますが、私達は基礎点が伸びませんでした。
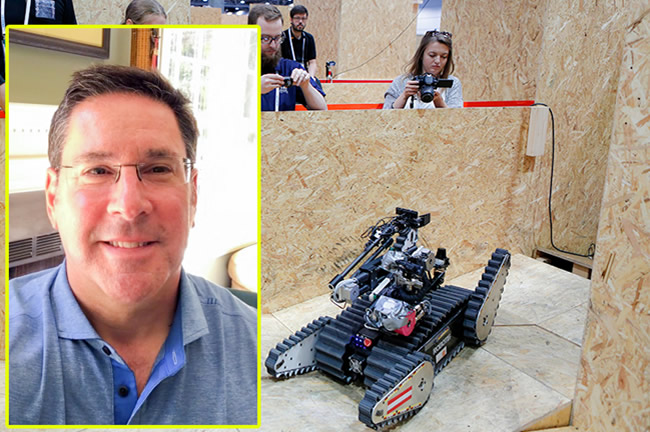
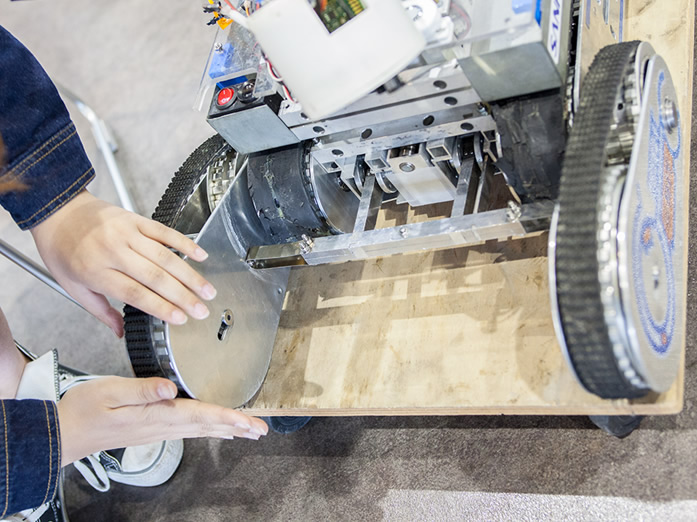
- これがロボカップジャパンオープンで優勝し、国際大会のレスキューリーグにも出場したロボットですね。このロボットの最大の特徴を教えてください。
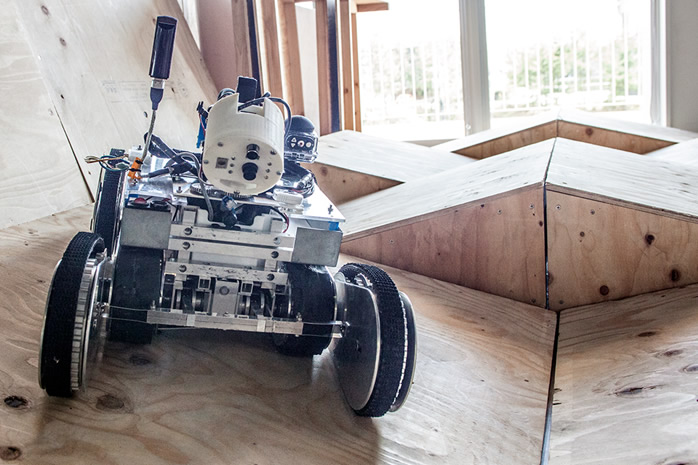
このロボットは小さい割に、段差を含めた走破性が高いとの評価を頂きました。最大の特徴は「操縦が簡単」という点です。例えば、段差を超えたり階段を上がるとき、通常は段差にあわせてサブクローラー(ここでは前輪にあたる部分)を持ち上げる操作が必要です。しかし、このロボットはサブクローラーに工夫があって、段差にぶつかると段差に併せてサブクローラーが持ち上がり、プーリがかかりさえすれば駆動力で自動的に段を上がろうします。そのため前進の操作をするだけで段差を超えていくことができます。
ただ、このロボットは20cmくらいまでの段差を想定して設計しているのですが、ロボカップ世界大会ではもっと高い段差のあるコースもあり、このロボットの構造ではサブクローラーを引っかけて登ろうとしても後ろに転倒しまうシチュエーションが出てしまうだろう、と感じています。
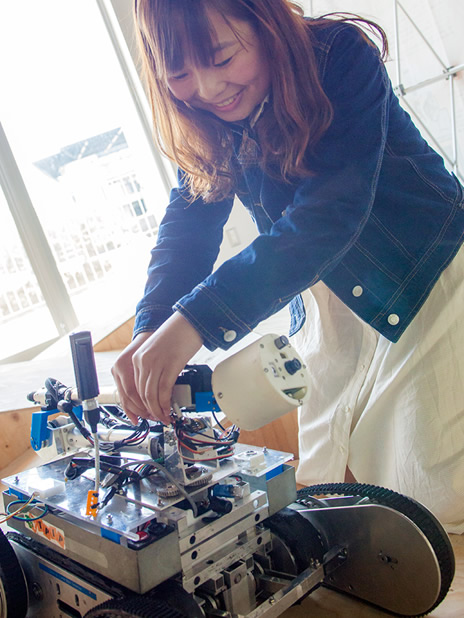
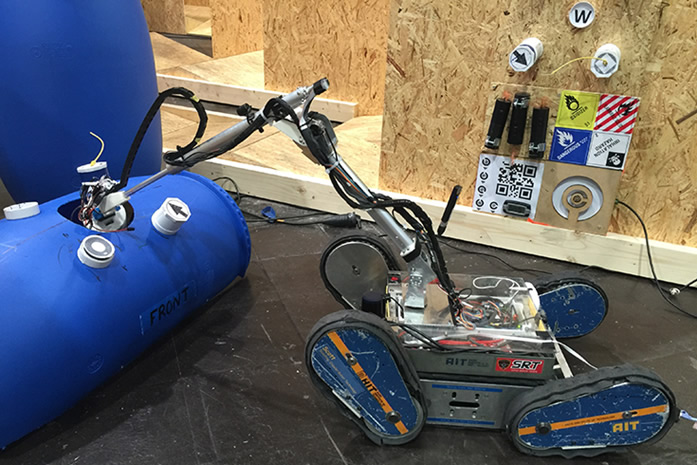
- アームには何が装備されているのでしょうか?
アームの部分にはカメラと温度センサー、CO2センサー、マイクが搭載されています。アームを伸ばして周囲や穴(パイプ)の中を確認したり、生存者がいれば呼吸によって出るCO2や、救助を求める声を検知することで発見がしやすくなります。ロボカップの場合は、息を吹きかけてCO2を検出する項目やマイクで声を収集する項目が基礎点にあります。また、スピーカーも取り付けることができます。スピーカーは遠隔操縦者が要救助者に声で呼びかけて、コミニュケーションをとることが想定されています。

アームを伸ばして穴から覗いて中の様子や文字を確認するだけでなく、扉を開ける、積み木を重ねる、障害物をどかす、所定の位置をペンでタッチする等、「ハンドの器用さ」も重視されてきています。
(写真提供:愛知工業大学)
半自律機能を研究していきたい
- では、これからの課題は、ソフトウェアによる制御機能の搭載ですか?
半自律走行を導入したいです。階段を登るような規則的な段差が続くステージでは、ロボットも連続した規則的な動作になります。そんな状況では半自律システムの方がスムーズで速いかもしれません。また、段差を登るとき、アームを前に伸ばして重心の位置を前方に移動した方が転倒しにくくなります。ロボットの傾きやアームの角度は各センサーで測れますから、ロボットが傾きから均衡がとれるアームの位置を自律的に計算してくれると、安定して、操縦も更に簡単になると思います。そのために半自律的な走行やバランス維持のためのソフトウェアによる支援が有効ではないかと感じています。
しかし、機械工学を専攻している私達にとって、ロボットを走らせること自体はそれほど難しいことではありませんが、制御系ソフトウェア技術は得意とは言えません。
- なるほど。重量バランスをとるためにアームを使うわけですね。
先程のハンド機能も、ソフトウェアの制御技術によって自動化や半自動化を導入することで、ものを認識したりつかむ機能などの精度が上がったり、更に操縦支援ができる可能性は多分にあると思っています。強豪チームとの差はそのような部分だと感じています。
今夏の世界大会では自動化したハンド機能を追加して出場できれば嬉しいのですが、いまの時点では明言はできません(笑)。
- ロボットをやっていて楽しかったこと、悔しかったことをあげて頂けますか?
一番嬉しかったことは、ロボカップのジャパンオープンで優勝できたこと、そして憧れだったロボカップ世界大会に出場できたことです。悔しかったことは、日本大会ではこのロボットの大きさやスピードは一般的なレベルで競うことができますが、世界大会になると他のロボットはとてもパワフルで自動化も進んでいて、力不足を痛感したことです。
- レスキューリーグならではの魅力を感じるのはどんなときでしょうか?
私達のロボットが実際の災害現場でも役立つことが実感できたときです。例えば、大学は豊田市にあるので、地元の豊田市消防署と連携してこのロボットが合同訓練に参加したりしています。また、笹子トンネルの天井板崩落事故や、ゆるい地盤の亜炭鉱などで救助ロボットを活用するための研究会やプロジェクトにも参加しています。そんなとき、世界大会で感じたロボットの課題を克服すれば、実際の災害救助活動や調査等でも、このロボットがもっと役に立ちそうだと感じることがあり、それがうれしいと感じています。
例えば、危険な災害現場にロボットが入って現場周辺の地図を作成したり、カメラで状況を見て、救助隊員が入る前に多くの情報を得ることができます。また、暗い室内や、煙が充満して視界が悪い状況でも熱検知センサーなどを駆使すると中に人がいるかどうか、どこにいるかなども解るようになってきました。先日も消防隊員の方と合同訓練を行い、地下閉鎖空間にいる要救助者を捜索するという訓練を行いましたが、要救助者役の消防隊員の方を一瞬で見つけることができました(笑)。
著者・撮影:ロボスタ 神崎洋治(http://robotstart.info/)
[ 渡邊 彩夏氏 プロフィール ]
愛知工業大学 大学院工学研究科
博士後期課程 生産・建設工学専攻 1年生
AIT Pickers (DERA Pickers)
1992年生まれ

Global Sponsors

Global Partner
Platinum Sponsors



Gold Sponsors







Silver Sponsors















Bronze Sponsors





















Official Logistics Partner



ロボカップの動画はこちらから
記者会見の様子はこちらから

名古屋市のロボット工作教室情報はこちらから

ロボカップ2017名古屋大会事務局
((株)インターグループ内)
[E-mail] info@robocup2017.org
[TEL] 052-581-3241
〒450-0002
名古屋市中村区名駅2-38-2
オーキッドビル8F