RoboCup2017 Nagoya Japan(ロボカップ2017)



RoboCup2017 Nagoya Japan(ロボカップ2017)
ディープラーニングの導入でビジョン技術がステップアップ
ヒューマノイドリーグの進化とロボットの耐久性
2016年に開催された「ロボカップ世界大会2016」ドイツ・ライプツィヒ大会では、千葉工業大学(CIT)のチーム「CIT Brains」が大活躍しました。ヒューマノイドリーグ部門キッドサイズのテクニカルチャレンジで1位に輝き、テクニカルチャレンジでは世界大会5連覇の快挙を達成しました。キッドサイズのサッカー 4on4では惜しくも準決勝で敗れて3位、アダルトサイズ部門ではテクニカルチャレンジで3位、全てのサイズを対象とした投票ではベストヒューマノイドの2位を獲得しました。

4on4のサッカー競技で勝ち進むために必要なロボット技術とは
- まずは昨年のロボカップではキッドサイズのテクニカルチャレンジ5連覇の快挙達成、おめでとうございます。
ありがとうございます。ただ、テクニカルチャレンジは1位を獲得できましたが、負けてしまった部門がありましたので、今年は出場する部門については完全制覇を目指す、リベンジの気持ちでいます
関さんは2017年4月で4年生、ロボカップには2015年の中国大会と、2016年のドイツ大会から参加しています。 CIT Brainsはここ数年、ロボカップサッカーのヒューマノイドリーグで、キッドサイズ部門(ロボットの身長40~90cm)とアダルトサイズ部門(130~180cm)に出場しています。メンバーはキッドサイズが約12人、アダルトサイズは約6名程度で取り組んでいて、関さんは技術的には主にキッドサイズ部門に関わっています。 キッドサイズの競技は4on4で1チームは4機体。CIT Brainsは予備を入れて7機体の体制でのぞんでいます。アダルトサイズは昨年まではPK戦形式でしたが、今年からは1on1となります。ただ、機体は1台のままなので、キッドサイズよりは少ないメンバーの人数になっています。 ちなみにテクニカルチャレンジ部門というのは各サイズに設けられていて、4on4などの得点を競うサッカーの試合とは別の競技です。ループシュートをしたり、速いドリブルや高いジャンプをしたりと、技術的に高度な動作を1機体で披露して審査員がそれを採点する競技です。
- 前回は、関さんが担当するキッドサイズ部門が、残念ながら準決勝で敗れてしまったんですね
はい。試合(試合時間は10分ハーフの20分)は0対0で、5分ハーフの延長にもつれ込みました。それでも両チーム得点が入らず、PKとなり残念ながら1点差で負けてしまいました。
- テクニカルチャレンジでは1位に輝いたということは、ロボットには高いポテンシャルがあったということですよね。しかし試合では負けてしまう。試合に勝つにはテクニカル面とは別の要素が必要になるのでしょうか?
そうですね。例えば、計20分の試合時間を競い抜くだけの持久力とペース配分があります。
- 人間の陸上競技で言えば、マラソンとスプリントのような違いがロボットにもあるんですか?
ペース配分や疲労面ではロボットも人間とよく似ています。長時間稼働していると自分の身体を支えているモーターに熱がたまったり、疲労というか、いわゆるモーターがヘタった状態になると、動きが鈍くなったり、想定したパワーが発揮できなくなります。例えば片側の脚のモーターが疲労した状態になると真っ直ぐ進めなくなって転んでしまったり、起き上がる力が出せなくなったりします。試合終了まで高いパフォーマンスをずっと発揮し続けるロボットを準備することは意外と大変です。

- 疲労を防ぐには、ロボットにペースを抑えて動くようプログラミングするということでしょうか?
ペースを抑えることも大切ですが、運用で重要なことは、まずはロボットが余計な動きをしないよう制御することですね。自チームの他のロボットがボールに向かって行ったら他の3体のロボットは無駄な動きをせず、最適な配置(フォーメーション)につく、といった感じです。 また、設計時に重要なことは、ロボットの重心がセンターにぴったりくるように重量配分することです。重さに偏りがあると片側にモーターの負荷がかかってしまって耐久力が落ちてしまいます。
- 私がすごいと感じるのは、人間がラジコンなどで操縦してペース配分やロボットの配置を決めているわけではなく、自律ロボットが判断しながら動いているところです。ちなみに同じ製品のモーターでもアタリとハズレなどの個体差があるのが実状ですよね。
はい。高い性能を発揮する調子の良いモーターが時々あって、キレの良い動きをするロボットが出てきます。僕たちはそれを「エースストライカー」などと呼んでいます(笑)。世界大会の前にはモーターを新品に替えますが、モーターの調子は実は日によって変わったりもします。だから、その日に調子のよい機体から選んでいって、試合にのぞむようにしています。実践では転倒や疲労などからモーターの調子も変わってきます。

- ロボカップに2年間出場してきて、どんな大会だと感じますか?
ロボカップは学生の大会ではなく、一般の研究者の方や開発者の方も参加する大会なので、世界中から強豪チームが集まってきます。そのため、オープンの学術・技術大会であるとともに、自分たちの最新技術が強豪相手にどれだけ発揮できるか、勝つことにもこだわった大会だと感じています。最近はロボットが注目されていることもあって、メディアの取材や中継も多いので各国のチームも気合いが入っているな、と感じます。
- ロボットの技術は毎年、進歩しているように感じますか?
以前のヒューマノイドリーグはどうやって早くボールに近付くかといったレベルで技術を競っていましたが、最近ではペース配分を考慮したり、機体をどのタイミングで交替させるかなど、戦略・戦術的な要素が加わってきて、CITの先生も「ここ数年で急激な進歩が見られている」と言っていますね。
ヒト型のロボットは、安定して二足で歩くというだけでも技術的にはすごいことです。更にサッカーでは相手ともみ合いながらボールを脚で運んだり、ゴールに向かって蹴るのは至難の業です。人間のようなスーパープレイはまだ望めませんが、見た目よりもずっと高度な技術の結晶です。
今年、CIT Beainsは、今注目されている人工知能(ニューラルネットワーク)の技術「ディープラーニング」を導入します。
■ディープラーニングとロボットのビジョン技術
この日、関さんがインタビューのために用意してくれたキッドサイズのロボット「アクセライト」にはディープニューラルネットワーク用のAIコンピュータボードとしてNVIDIA社の「Jetson TX1」が搭載されています。
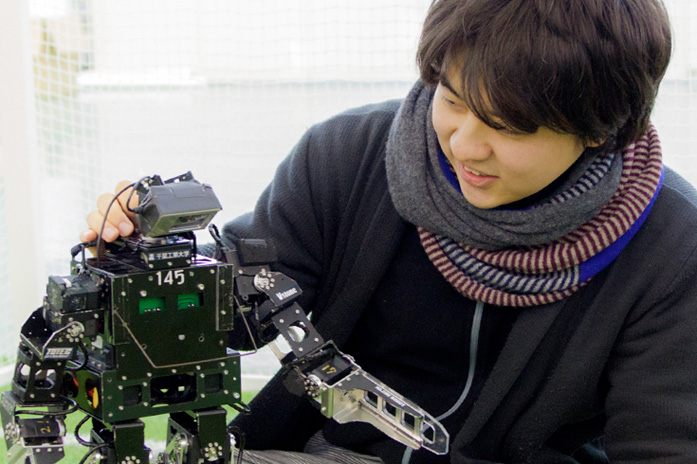
CIT Brainsチームのロボカップ用ロボット「アクセライト」。ボディの主素材は軽量で丈夫なカーボンを使用。この機体にはAIコンピュータボードが搭載されている
- 過去に出場した2大会で印象に残っていることはありますか?
2015年の中国大会では大きなルールの改正がいくつかあって、喜びも苦労もありました。 変化のひとつはフィールドがカーペットから人工芝に変わったことです。二足歩行は芝の長さや向きに影響を受けます。そのため、カーペットの頃に比べて安定した歩行やキックが難しくなりました。それまでは足の裏が平面のロボットが多かったのですが、平面だと芝生の向きによっては滑りやすく、徐々に荷重が後ろに寄っていってしまうんです。CIT Brainsはいち早くそれに気づき、足のヘリにボールが乗らないように上向きに付ける予定だったプレートを下向きに付けてみたところ、安定性が増して接地性やバランスがよくなりました。それからはスパイクや鋲形状の足裏デザインのロボットが多くなりましたね(笑)。

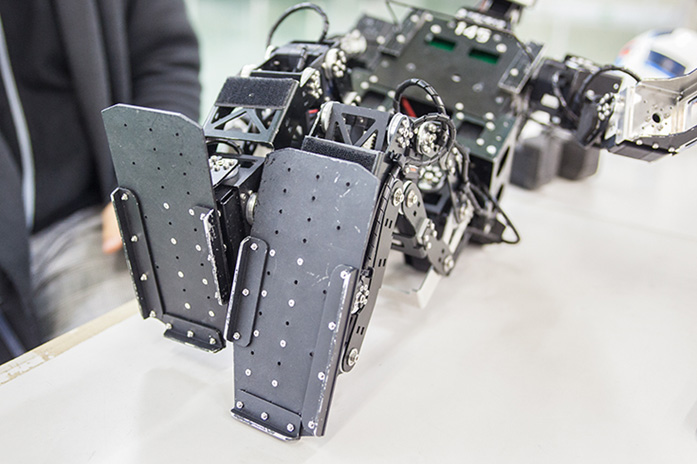
アクセライトの足の裏。中国大会では機転を利かせてプレートを下向きに付けて、滑ってバランスを崩しやすい人工芝に対応した。ロボカップではそんな「気づき」が重要だと言う
次にボールのデザインの変更です。それまではオレンジ色のボールが採用されていたので、多くのロボットはオレンジ色を検知してボールを識別、追従していました。しかし、この年から人間用と同様にデザインされた白基調のボールに変わったため、これからボールそのものを識別して追従するビジョン技術が要求されるようになりました。
そこで関さん達のチームもディープラーニングによる機械学習でボールを識別して追従する、見失わない技術の研究をはじめました。

- どのように対策したのですか?
この機体にはディープラーニングのシステムを導入しています。以前、「ディープラーニングでは画像の分類で成果が出ているらしい」と聞いて、ロボットに使ってみたいなと思っていました。昨年の大会でその技術の一部を導入したものの、それはまだ簡易的な分類システムでした。ボールを識別するというより、ボールだと思ったものが本当にボールかどうか分類して判定するようなしくみで、補完程度にのみ使用しました。しかし、ロボットがボールの追従に戸惑うケースがまだまだ多くて、成果が出たと言えるところまではいきませんでした。
- ドイツ大会後に、GPUを搭載したAIコンピュータボードがコンピュータビジョン技術(ロボットの視覚)に有効であることを知って搭載したのですね?
はい、ボールが写っているたくさんの画像をディープラーニングで学習させることで、ボールが識別できるようになりました。画像の分類ではなく、ボールの検出として利用して成果が出ているので、今年の大会からは搭載していく予定です。
- ディープラーニングはAI関連のニューラルネットワークの技術のひとつとしてあげられますが、従来のボール認識と比べると一線を画している感じがしますか?
そうですね。まだ検証している最中ですが、ロボットが振り向いたときなどは視界の画像はぶれて、ぼやけてモヤッとした画像になるのですが、そういう画像でもボールを正確にみつけやすいのが強みだと感じています。サッカー競技にはビジョン技術がとても重要なので、今年はディープラーニングの研究がひとつのキーポイントかもしれませんね。前回の大会ではボールが白線やゴールと重なると見えにくいという問題がありましたが、ディープラーニングによって多くの課題が解決できています。

ディープラーニングがビジョンに有効なのは解ってきましたが、相手のロボットを識別するのは意外と難しいようです。というのも相手ロボットを機械学習で覚えるには大量のロボットの画像が必要です。千葉工大のロボットの写真なら大量に撮れば用意できますが、それでは味方のロボットの識別にしかならず、相手が全く異なるデザインのロボットであればどれだけ効果があるかはまだ未知数だからです。AI関連技術として注目を浴びているディープラーニングですが、やはり予めビッグデータがないと精度を上げるにはなかなか難しい、という実状をよく表した事例かもしれません。
■急激な進化を感じるヒューマノイドリーグ
- アクセライトはビジョンの他にもこの数年で大きく改良した部分はありますか?
一昨年までは、軽量化を重視して、腕は曲がらない、肘にモーターがないデザインでした。転倒して起き上がるときに腕を使うのですが、腕を伸ばしたままだとひっかかってしまい、起き上がれないことがよくありました。モーター機構の分、重量は重くなりましたが、肘を曲げてから伸ばして起き上がるように変更し、起き上がるスピードが格段に速くなりました。ただ、もしかするとその分、重量が増えたせいで昨年の準決勝ではPKまで万全のパワーが持続できなかったのかもしれません。断定することはできませんが。

千葉工業大学は、倉庫を改造した広い作業スペース内にロボット用のサッカー・フィールドが常設されている
- 関さんから見て、ロボカップに出場するロボットは進化しているなぁと具体的に感じますか?
AIというか知能の部分がめざましく進歩していると感じます。 小型リーグと違って、チームフォーメーションを詳細に考えて戦略を立ててくるチームはそれほど多くはありませんが、うちのチームの場合は、ロボット間で通信を行い、攻守に別れて動くように人工知能を組んでいます。例えば、1機体がボールを捉えたら、もう1機体がアタッカーとして攻撃面に参加し、あとの2機体はディフェンスに回るといった動きです。

ハードの部分も変化を感じています。レギュレーションが変わって、キッドサイズのロボットの身長が40~90cmになりました。研究段階とはいえ、他のチームで90cm弱の大きなサイズのロボットが出てきて、動いているのを見ると脅威に感じますね(笑)。うちも負けていられないので、モーターのトルクと耐久性がとても向上した頑強な新型ロボットを開発中です。今年の大会に間に合えばそれも投入できたらいいな、とは考えています。 アダルトサイズの進化もめざましいものがあります。一昨年は歩くのがやっと、というロボットが多かったんですが、昨年はそれまでよりスムーズに歩いてボールが蹴られるようになっていました。それにはうちのチームのアダルトサイズ担当のメンバーも驚いていました。 今年はもっと進化しているかもしれないのでキッドもアダルトもどちらも楽しみですね。
この日はCIT Brainsのアダルトサイズ担当のチームもロボットの改良作業を行っていた
CIT Brains 取材当日のアクセライト
ハイジャンプ
ゴールキック
著者・撮影:ロボスタ 神崎洋治(http://robotstart.info/)

Global Sponsors

Global Partner
Platinum Sponsors



Gold Sponsors







Silver Sponsors















Bronze Sponsors





















Official Logistics Partner



ロボカップの動画はこちらから
記者会見の様子はこちらから

名古屋市のロボット工作教室情報はこちらから

ロボカップ2017名古屋大会事務局
((株)インターグループ内)
[E-mail] info@robocup2017.org
[TEL] 052-581-3241
〒450-0002
名古屋市中村区名駅2-38-2
オーキッドビル8F