RoboCup2017 Nagoya Japan(ロボカップ2017)



RoboCup2017 Nagoya Japan(ロボカップ2017)
レベル向上の鍵はボール認識と動作を素早くすること
少しずつでもできることが増えていくのが楽しい
「トップの強豪チームは独自のアイディアを持っていて、僕たちが考えてもいないようなことをやってきます。それを目の当たりにしたときは奮い立ちますし、自分たちが日頃から研究している機械学習の応用技術を活用して、負けずに強いロボットのチームにしたいな、と感じます」
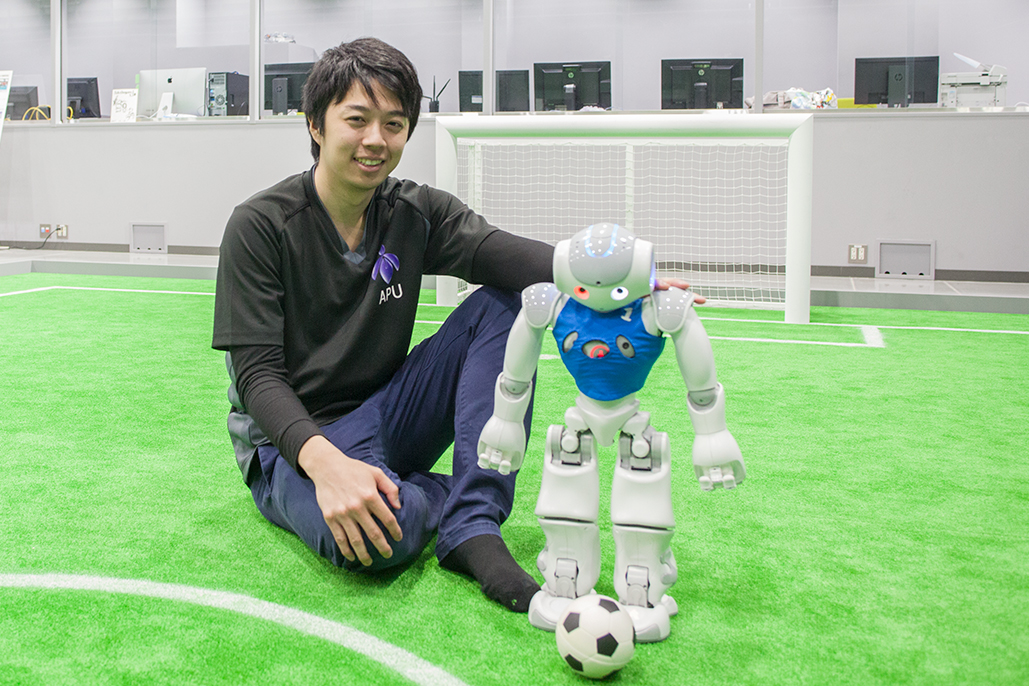
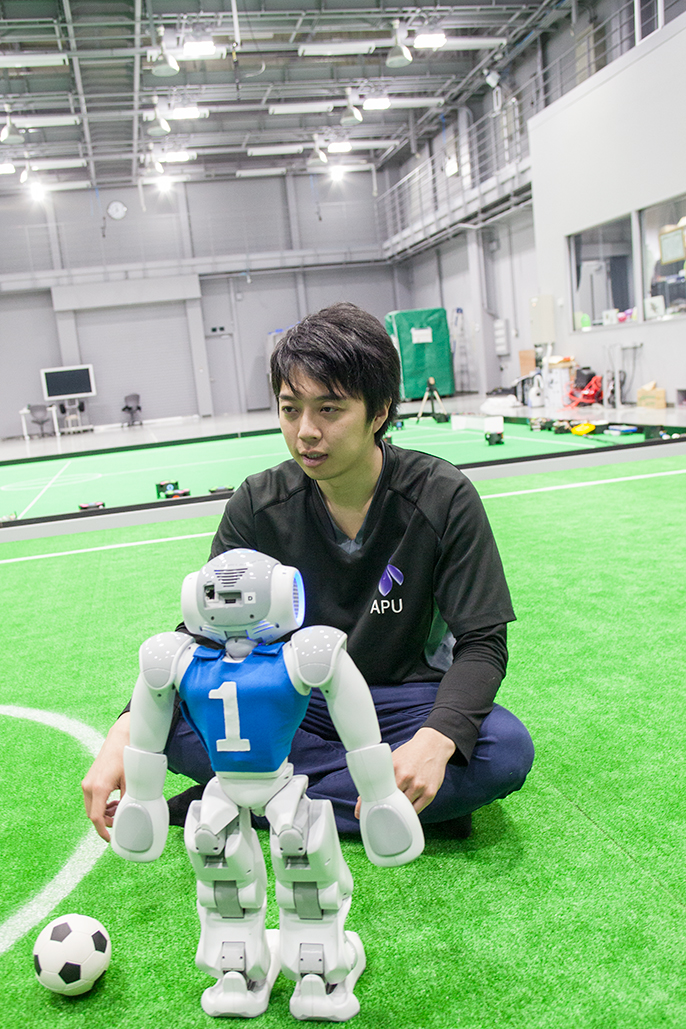
日髙憲太氏は大学院の二年生。二足歩行型のコミュニケーションロボット「NAO」を使うサッカー・スタンダード・プラットフォーム・リーグ(SPL)に参加しています。昨年のドイツ大会では惜しくも予選で敗退、涙をのみました。今年の世界大会にも出場する日髙氏に、ロボカップやサッカーSPL、ロボットで行うサッカー競技などについて聞きました。
- ロボットの研究や競技をやることになったきっかけを教えてください
実はロボカップがきっかけです。子供の頃から「日本人としてなにか活躍したい」という漠然とした気持ちがありましたが、ロボットに関わったことはまったくありませんでした。大学に入って研究室を選ぶ時期になった際、ロボカップという競技があると聞かされ、そこではロボットが人工知能で自律的に動いていることを知りました。しかも世界大会があるので、自分たちが大学で研究していることが活かせて、かつ日本人として活躍できるかもしれないと感じました。
- 現在、どのように活動していますか
大学院では情報科学研究科のインテリジェントマシンラーニング研究室で勉強しています。ディープラーニングを含めた機械学習技術の研究をしています。ロボカップでは、この研究を活かしつつ、さまざまなロボット工学技術も学んでいきたいと考えています。
現在、大学にはロボカップサッカーのチームがふたつあります。
ひとつが二足歩行用ロボット「NAO」を使ったサッカーSPLのチームで僕はそこに参加しています。もうひとつのチームは「小型リーグ」です。

愛知県立大学の研究施設(次世代ロボット研究所)。ロボカップを想定したフィールドが常設されている。手前がサッカーSPL用、奥が小型リーグ用。遠くに数台のPepperも見える
- ロボカップに参加してみての感想を聞かせてください
「予想していた以上に難しい」と言うのが本音です。大学での専攻でプログラミングをやっていますが、今までロボット工学を学んだことがなかったため、ロボカップで必要なロボット工学に関する知識を調べたり、ロボットについて勉強しながらやっています。

- サッカーSPLについて教えてください
「NAO」という二足歩行ロボットを使ってサッカー競技を行うリーグです。試合は1チーム5台で行います。ロボットの改造は原則として許可されていないので、競技はソフトウェアや戦術の技術を追求したものになります。
私は昨年と一昨年にチームで出場し、今年が3回目となります。ルール改正等で年々難しくなっていると感じます。一昨年はボールがオレンジだったので色の識別でボールを認識していましたが、昨年から白黒のボールを使うようになり、より高度な認識技術が求められるようになりました。また、今年からフィールドもカーペットから人工芝に代わり、二足歩行ロボットでは安定して歩くのさえ大変という状況になりました。
- ボールの認識にはディープラーニングを使用していますか?
大学ではディープラーニングの研究も行っていますが、ロボットには使用していません。サッカーSPLの場合は、ロボットの改造が不可なので、GPUボードやAIコンピュータなどの増設はできません。そのため、ディープラーニングのように負担が重い技術ではなく、機械学習でも処理の軽い技術を使って認識率を上げていこうと研究しています。
- 各ロボットは自律的に動作していると思いますが、どのように行動していますか?
各ロボットがいっせいにボールに向かっていくのか、それともチームプレイをしているのでしょうか?
私達のチームの場合は、チームプレイをしており、フォワード、ディフェンダー、キーパーがそれぞれの⾏動範囲を決めて、役割に従って動いています。⾏動範囲内でできるだけ早くボールをみつけ、そのボールの位置によって、各プレイヤーがそれぞれ考えて移動をします。その後はボールの場所まで移動してゴールの⽅向に向かってキックします。
シュートがはずれた時のこぼれ球を⾒つけたら再度フォワードがシュートするようにプログラミングしています。
- ロボット間でのパスは難しいですか?
トップチームの一部はできていると思いますし、実際にやっているところを見た時はすごく驚きました。強豪チームがパスサッカーをしているところを見ると、感動するし、自分たちのロボットもできるようにしたいとは思いますが難しいですね。
パスに必要な手順としては、まずは自分のいる場所を理解する「自己位置推定」の技術が必要です。その上で味方のロボットの位置を把握してボールを蹴ってパスしますが、その際にキックの強さを制御することも必要です。人間では普通にできることでも、ヒューマノイドロボットではまだ難しいことだらけです。

- どのようなときにパスは特に有効だと感じますか?
現状ではロボットの動作が遅いので短いパス(パスを刻む)はあまり有効だとは感じませんが、長距離のパスはボールを前に進める上でとても有効だと思います。それから、オフェンスとディフェンスが一対一になる局面では、ディフェンスをかわしてボールを味方に蹴るという動作ができるようになればレベルが上がるだろうな、と感じます。

- 今後はどのような点を伸ばしたいですか?
レベル向上のための重要な課題が3つあると考えています。
「歩行」「ボールの認識」「判断」です。
「歩行」は人工芝のフィールド上でどれだけ動くスピードをアップできるかがポイントだと感じています。
次の「ボールの認識」ですが、ボールの位置を正確に測れる範囲はおそらくトップのチームでも5m程度が限度だと思います。競技のフィールドはおよそ6m×9mですが、人間は遠くてもボールを認識し、かつ、だいたいの位置がわかるので、ロボットでもボールまでの距離が遠くても認識できる技術が必要です。
- なるほど。3つめの「判断」というのは?
ロボットはまだ規則どおりにしか動けないので、今後は自律的に「判断」できる機能を加えたいですね。例えば、ロボットに向かわせる場所や方向を指示したり、ゴール方向にボールをキックといった動作を自律的に実行するようプログラミングはできますが、ロボットが移動したりキックする方向に相手のディフェンスがいる場合は横や後ろの味方ロボットにパスを出すなどの工夫が必要です。人間の場合はこういった未知な状況でもとっさの判断で柔軟に対応できますが、私達のチームのロボットはまだそこまでの判断ができないのが現状です。

- 独自の技術も実践していきたいですね
はい。私たちも毎年技術を開発していますが、私達はオープンソースを読んで研究したり、オープンソースの機能も利用させていただいています。独自の技術とそれらの技術を私達のチームのロボットに組み込んで競技に臨んでいます。今後は皆さんに使っていただける技術を開発していきたいと考えています。
そのため、現在私たちが考えている3つの伸ばしたい点を、機械学習を用いて開発していきたいと思います。
ヒューマノイド型ロボットは安定した歩⾏をするだけでも今は⼤変な状況ですが、できることが増えていけば、少しずつでも⼈間がやっていることに近付いていることを実感することができて、それがとても楽しいですね。
著者・撮影:ロボスタ 神崎洋治(http://robotstart.info/)
[ 日髙 憲太氏 プロフィール ]
1993年 愛知県生まれ
愛知県立大学大学院 情報科学研究科
インテリジェントマシンラーニング研究室
ロボカップ世界大会 出場経験あり
チーム名: Camellia Dragons

Global Sponsors

Global Partner
Platinum Sponsors



Gold Sponsors







Silver Sponsors















Bronze Sponsors





















Official Logistics Partner



ロボカップの動画はこちらから
記者会見の様子はこちらから

名古屋市のロボット工作教室情報はこちらから

ロボカップ2017名古屋大会事務局
((株)インターグループ内)
[E-mail] info@robocup2017.org
[TEL] 052-581-3241
〒450-0002
名古屋市中村区名駅2-38-2
オーキッドビル8F