RoboCup2017 Nagoya Japan(ロボカップ2017)



RoboCup2017 Nagoya Japan(ロボカップ2017)
Robots and Their Technologies Evaluated at RoboCupRescue Have Helped Overcome Difficulties at Actual Disaster Sites
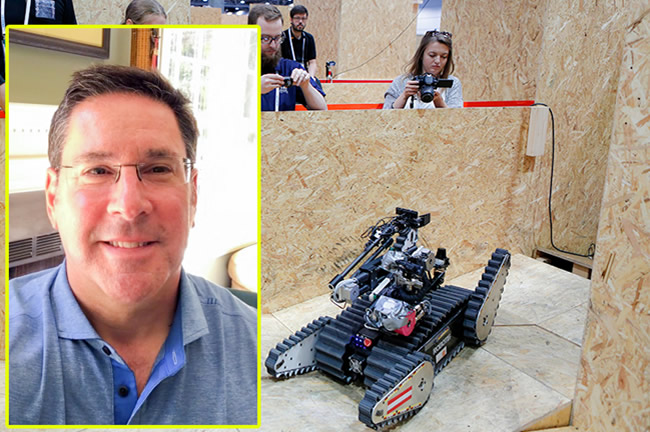
Mr. Adam Jacoff is a robotics research engineer at the U.S. Department of Commerce, National Institute of Standards and Technology (NIST). Having developed a variety of innovative robots so far, he is one of a group of experts who have formulated the technology readiness level assessment of autonomous mobility for the U.S. Army’s Experimental Unmanned Vehicle (XUV).
Currently, his main efforts include developing, formulating and establishing a suite of 50 standard test methods for robots to objectively evaluate ground, aquatic and aerial system capabilities, and evaluate emerging technologies.
Specifically, he is developing standard test items and evaluation methods to measure a variety of functions and capabilities, such as mobility, operability, sensing performance, power/durability, and interaction between humans and robots.
Mr. Jacoff says that the RoboCupRescue League is essential to the development of such items and methods.
Challenges That Need to Be Overcome at Actual Disaster Sites Are Tackled at RoboCupRescue
- How are your efforts at NIST and RoboCupRescue related?
The robots I’m now researching evaluation standards for at NIST are engaged in search and rescue in places where emergency response is required, such as sites of earthquakes, hurricanes and other types of natural disasters, as well as sites of fires, explosions and terrorist attacks.
In Japan, the Fukushima Daiichi Nuclear Power Station (Fukushima Daiichi) was seriously damaged by the great earthquake that struck in 2011. In situations like the Fukushima Daiichi accident, where human access is limited due to a wide variety of factors, the only option available for entering the site and performing various operations there is to use robots. The robots whose abilities are recognized at RoboCupRescue are highly likely to have the capabilities to perform such tasks.
- Do you mean that NIST’s standard test items for measuring robot capabilities are the same as those for RoboCupRescue’s tasks in a practical sense?
If you use a robot at a disaster site, the robot needs a wide range of capabilities in order to perform well in such a dangerous environment. Accordingly, you need to test and inspect such robots in advance to see if they have sufficient capabilities and if they can carry out various operations.
In the RoboCupRescue League, each team needs to accomplish 20 tasks, into which NIST’s test items have been reflected. As a result, robots that obtain the highest score at RoboCupRescue in compliance with these test methods are evaluated as also being likely to fulfill similar missions even at disaster sites.
- I see. So, you mean that robots that performed well in the RoboCupRescue League will surely be useful even at actual disaster sites, right?
Now that the RoboCup has become an international competition, competitors can demonstrate to the entire world how effective their robots will be even at an actual disaster site.
- Are the robots that drew attention at RoboCupRescue actually being used at disaster sites?
Yes. Their technologies are used by a wide variety of organizations, such as fire departments, the police, and the army.
For example, in the case of Fukushima Daiichi, a research institute for countermeasures is now in operation in Naraha Town. Some of the teams evaluated at this year’s RoboCup will join those engaged in research and development at the facility in Naraha, as well as members of TEPCO’s countermeasure taskforce, and have opportunities to exchange robot technology information. This will serve as a good opportunity for the teams evaluated at the RoboCup to exhibit the functions and capabilities of their robots. If the countermeasure taskforce becomes interested in such new technologies, the teams will proceed to the next phase. Using a mockup [arena] of Fukushima Daiichi, the teams will demonstrate the methods evaluated at the RoboCup. Although the mockup takes place in a clean and clear environment, it fully represents the situation of Fukushima Daiichi, enabling an inspection to see if the robot technologies will work effectively at the actual site. This is an important social contribution, and one that I feel is truly honorable.
- In that sense, RoboCupRescue is the first step toward solving serious problems at actual disaster sites.
Let me give you an even more specific example, the Quince, developed mainly by the Chiba Institute of Technology. This robot was highly evaluated at the RoboCupRescue held in the year before the disaster at Fukushima Daiichi. Deployed via remote control to inspect the inside of Fukushima Daiichi, the Quince climbed the stairs at the site and performed 3D mapping, before successfully reaching the facility’s fifth floor.
At that time, in addition to the Quince, a wide variety of military robots tried similar challenges at Fukushima Daiichi, but they couldn’t climb upstairs from the first floor. This is because a collapse had occurred at the facility, and a vast amount of dust had made the facility’s metal stairs extremely slippery. Even in that environment, the Quince was able to ascend the stairs, making full use of its four independent flippers and body checkers. On the fifth floor, the robot’s progress was stopped by fallen debris on the stairs. Although it was examined whether the robot should attempt the tasks of removing the debris or climbing over it in order to proceed forward, such attempts were ultimately abandoned since trying new tasks without any practice would entail a lot of risk.
So, our next challenge is to ensure that the robot can remove debris on stairs. Consequently, the new task of “clearing debris on stairs” has been added to the next RoboCupRescue’s tasks. I believe that the researchers who compete in the RoboCup will surely achieve this task.
As you see, if some difficulty arises in an actual situation, it will be added to the tasks to be performed at RoboCupRescue, leading to new technological development to overcome the difficulty through friendly competition. This is how science and robots evolve.


The Quince, deployed at the site of the accident of Fukushima Daiichi
RoboCupRescue: Teamwork of Humans and Robots
- What is important at RoboCupRescue?
There are many answers to that question, such as mobility, dexterity, autonomy and mapping. Reliability is also important.
Starting from this year, an aerial system will be introduced as a new challenge in mobility. If a caterpillar or other type of robot moving on the ground coordinates with a drone or other type of vertical takeoff and landing plane, it will present a new mobility capability. Since you can produce drones much less expensively today, I feel that you can introduce them and participate in RoboCupRescue more easily. So, the key to the task would be “operability that is easy for anyone.”
At RoboCup Nagoya, Japan, I think you will be able to see a drone competition and an event where drones and caterpillar robots collaborate with each other in a dome stadium with a safety net erected.
- That sounds very exciting! You’ve mentioned “autonomy,” but which do you think is more important for rescue robots, operability or autonomy?
At many disaster sites, in order to ensure human safety, operators are supposed to operate their robots far away from them via remote control. However, in addition to such remote control, there are many cases where autonomy is effective. The computer mounted on a robot can distinguish between human beings and other objects. If equipped with a laser scanner, the robot can measure objects to millimeter precision. Since the robot knows its own shape and size, it can appropriately judge whether it can move through a path or door in front of it. If the operator conducted visual inspection via remote control, it might be less accurate. Moreover, the robot can look at a heat source and estimate the temperature around it, and also search for survivors. You know, at the RoboCup, you can directly measure autonomy through the competitions. The on-board intelligence that the robots themselves possess is truly significant and effective.
At the same time, judgment made by well-experienced human operators via remote control is sometimes supremely important. If there are a number of doors or routes, which one should we select? Appropriate judgment will be required with consideration given not only to their widths and temperatures, but also to the situation and various other complex factors.
- Do you mean collaboration between human beings and robots is the key?
That’s exactly right. There is a distance between a robot and the operator who performs the remote control. What can bridge that distance is autonomy, which supports the robot’s action in the background.
I guess you have seen a rescue dog and its handler conducting a search operation at a disaster site. The rescue dog and handler form a single team and act in perfect union.
While considering safety, the handler makes adjustments so that the dog can demonstrate its capabilities to the fullest extent possible. Following the directions of its handler, the dog makes the fullest use of its capabilities in search and rescue.
This is exactly the case with the relationship between a human operator and a robot. Whether they’re at a disaster site or RoboCupRescue, the operators judge, operate, and control their robots to draw out their capabilities to the maximum. In some cases, it might be important for the robots to act based on their own autonomy. If such a team works as one and cooperates in this way, I believe it will be able to demonstrate its capabilities.
- Can you conclude this interview with your message for prospective audience of the RoboCup? What do you think are the highlights of the event?
I hope that they will see a kind of continuity from junior competitors to scientists at the RoboCup.
The Rescue has a junior league, drawing child competitors. In this league, relatively small robots, 30 cm high, compete in a small arena. Subsequently, in the regular rescue league, bigger robots, 120 cm high, compete in a bigger arena, demonstrating the cutting-edge technologies that have been researched so far. You’ll be able to see drones as well.
Lying beyond the technologies researched by all the competitors are the actual disaster sites. I sincerely hope that you will see all the competitors, ranging from children to scientists active in the front lines, attempting various challenges and working very hard to solve the problem of the accident at the Fukushima nuclear power station.

[ Profile of Mr. Adam Jacoff ]
Robotics research engineer in the U.S. Department of Commerce, National Institute of Standards and Technology (NIST), Engineering Laboratory, Intelligent Systems Division.
Global Sponsors

Global Partner
Platinum Sponsors



Gold Sponsors







Silver Sponsors
















Bronze Sponsors






















Official Logistics Partner




RoboCup2017 Nagoya Secretariat
(Inter Group Corp.)
[E-mail] info@robocup2017.org
[Tel] +81-52-581-3241
Orchid Building 8F, 2-38-2, Meieki, Nakamura-ku, Nagoya, 450-0002 JAPAN