RoboCup2017 Nagoya Japan(ロボカップ2017)



RoboCup2017 Nagoya Japan(ロボカップ2017)
RoboCup@Home League Giving Her Food for Thought about a
Future Where Humans and Robots Will Live Together
Teams from Tamagawa University began to participate in RoboCup in 2006, when they competed in the four-legged robot league. Used in that league was AIBO, a pet robot developed and sold by Sony. Since 2008, however, they have been participants of the newly established RoboCup@Home league. Tamagawa University is an elite institute as indicated by the following excellent achievements at RoboCup: champion of international competitions in 2008 and 2010; runner-up of international competitions in 2009 and 2012; and champion for three years running till 2010 at RoboCup Japan Open.
Ms. Nagase participated in RoboCup China in 2015, as well as RoboCup Japan Open and RoboCup Germany in 2016. In the German competition, an Innovation Award was presented to her team.
For the RoboCup@Home league of RoboCup 2017 Nagoya, her team will compete in the Domestic Standard Platform League (DSPL), where HSR, developed by Toyota Motor Corporation, will be used.
- How did you get interested in robots? Were you influenced by animation series such as Gundam?
When I was a child, I didn’t have a particular interest in robots. To me, most of the robots described in animation were something for fighting, and I didn’t like such robots so much. But one day, when I was watching TV, I saw ASIMO by Honda. I was deeply impressed by the robot interacting closely with humans, and felt “This robot doesn’t scare me,” and “I want to operate a robot.” That was the beginning.
At high school, I was a student focusing on subjects in the humanities, so, it was only after enrolling in university that I began to study about robots. Actually, I started from scratch by studying once again physics and mathematics.

So, you only started to study about robots after enrolling in university, right? What is your major at university?
My major is intelligent mechanical systems. In our department, where we can study both mechanics and informatics, we sometimes make machinery using a lathe, and sometimes learn software programing. In addition to taking regular classes, I also study at the Cognitive Development Robotics Laboratory, which mainly focuses on software research. I had no experience with robots, so at the laboratory, I’ve always received a lot of instruction regarding RoboCup from the professors and students with more experience than me.
Can you tell us how you felt and how you did at RoboCup competitions?
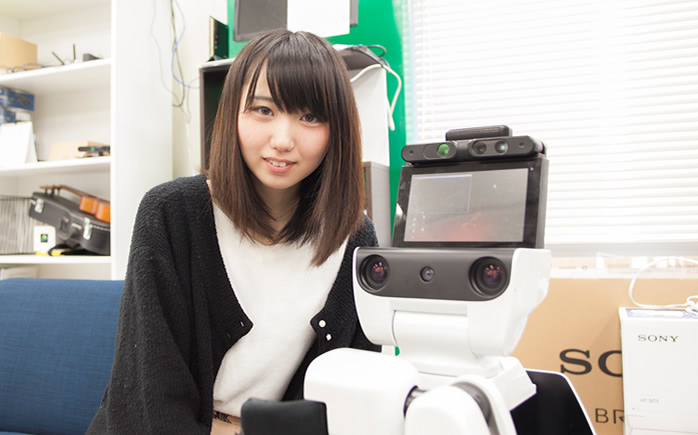
When we participated in RoboCup Japan Open in 2016, I was honored to be assigned the task of Robo Nurse (*) for the first time. Robo Nurse was a contest based on the theme of robots living together with people who require nursing care. Using HSR, a robot developed by Toyota Motor Corporation, for the first time, we created a control program specifically for the contest. Until then, I had never written a program to operate a robot, so I received instruction about Caffe, a machine learning library with the function of deep learning, and tried using it for the first time. Although I feel that we had devoted a lot of ingenuity to our robot, regrettably, we ended up finishing fourth.
(*RoboCup Japan Open and RoboCup Nagoya in 2017 will have no Robo Nurse league.)

HSR, a robot developed by Toyota Motor Corporation, and Ms. Nagase
- Finishing fourth is not that bad, is it?
Certainly not. But if we had performed like we did when we practiced at the laboratory before the event, we would have been able to earn more points (laughter). Partly because it was the first time we used HSR, we had problems one after another during the event, preventing us from performing as expected. In the event, the first thing that robots were supposed to do was mapping autonomously, using their SLAM function. But partly due to the many participants in the venue and the failure to obtain correct location information, our robot couldn’t make an appropriate map in the first place. We got stuck at the very initial stage. So, it is certain that environmental factors caused us many problems, but now I feel that we should have anticipated to some degree what problems we would face, and should have been prepared for them before the event. We were able to finish fourth, but we later discussed what we should have done to perform as expected. We were truly frustrated.
- You also participated in RoboCup 2016 in Leipzig, Germany, didn’t you?
Yes. I participated in the event as a member of eR@sers, a joint team together with the University of Electro-Communications. I supported manipulation & object recognition, so that our robot could recognize and grab designated objects placed on a shelf, and arrange them on a different shelf. Before this event, we had used the robot prepared by Toyota Motor Corporation, and our focus had been on operating the robot by combining software and tools that we had learned from our professors. In and after the Germany event, however, we began to do programing for plane recognition on our own, and to use Point Cloud Library (PCL) for computer vision. By doing so, I feel that we were able to incorporate our original ideas.

- Can you tell us about the evaluation criteria of the @Home league? Do you need to make your robot convey a PET-bottle placed on a shelf to a designated person without mistakes, receive an order at a restaurant, or look after things at home while the residents are away from home?
That’s almost right, but I feel that there is some storyline behind a task given in the league. For example, a robot needs not only to grab an item and lift it up, but also to accurately recognize an item designated from among many options arranged on a shelf and remove it to a vacant shelf. Such a task needs to be completed within a given time limit. If the setting is at a restaurant, the theme is collaboration between humans and robots. In this case, a robot needs to follow a person while maintaining a certain distance from the person, memorize the location of the table of each customer, and go to a designated table after a certain length of time to take an order. Thus, technologies to enable robots to work together with humans are required.
In case of Robo Nurse, if a person playing the role of a senior citizen waved to a robot, the robot needed to recognize that action and go to the person to ask what they wanted. Thus, robots needed to take action autonomously, based on a scenario in which robots were actually used conveniently in our daily life.
- I feel that the technologies needed for a robot serving as a waiter at a restaurant are slightly different from the technologies needed for a robot working in a living room. You know, a restaurant and a living room are different, for example, in terms of floor materials and what is there. So, do you need to create programs in advance so that your robot can operate appropriately in both types of setting?
That’s right. It’s not until the last minute that you’ll be designated to make your robot operate in a restaurant. So, you need to switch to your restaurant program very quickly. In the former event, transparent glass was used for the restaurant walls and partitions, making us very worried about the laser range finder installed in our robot not working accurately.
■Video
Demonstration of Tamagawa University HSR, following a person while maintain a certain distance.
- What are attractive points distinctive of the @Home league?
Although there are many leagues of RoboCup, I feel that the @Home league has its own attractive features. For example, a game in the soccer league has a clear winner and loser. Each audience member has their own favorite team, and if the team scores, they will get excited. In the @Home league, however, there’s no clear distinction between opponents and teammates. If a robot succeeds with a difficult challenge, the entire audience will be pleased and applaud the robot. On the other hand, if a robot fails to work appropriately, the whole audience will feel disappointed. I really like such a sense of unity at the venue and the homey atmosphere.

- What do robots mean to you?
Personally, I don’t like the idea of using robots for battles or competitions. I hope that robots will be of use for people’s daily lives or they’ll interact closely with humans. However, I feel that robots are still too cold and steely. To enable humans to live their daily lives together with robots in the near future, I believe that such a strong mechanical impression should be reduced more.
For communication, I think that robots should be able to participate in a mutual conversation, rather than speaking unilaterally, thereby engaging in communication in a true sense. Also, it will be great that when you shake hands with a robot, you can feel their warmth and softness. You know, when you are with someone, or when you feel like staying with someone, communication and warmth are important.
- So, what does RoboCup mean to you?
I participate in the RoboCup @Home league, which is based on the scenario of future household use of robots. This experience has given me food for thought about what it means to be of use for humans, and what is necessary for robots and humans to live together. I feel that the experience has enabled me to learn a lot, and was also very useful for my job hunting efforts.

- Finally, can you tell us how you feel now with RoboCup 2017 Nagoya ahead of you?
I’m a senior student, so personally, this will be my last opportunity to participate in RoboCup. Partly because this year’s RoboCup will be held in Japan, our team’s morale is improving. I began to study about robots after enrolling in university, and I’ve learned a lot from my professors and the laboratory’s members. So, I truly hope that I can repay the support that they’ve given me by achieving a favorable result.

[ Profile of Ms. Yuka Nagase ]
Born in 1995
Department of Intelligent Mechanical Systems, College of Engineering, Tamagawa University
Team eR@sers
2015: Participated in RoboCup China
2016: Finished fourth at RoboCup Germany. Received an Innovation Award.
2016: Finished fourth at RoboCup Japan Open.
Global Sponsors

Global Partner
Platinum Sponsors



Gold Sponsors







Silver Sponsors
















Bronze Sponsors






















Official Logistics Partner




RoboCup2017 Nagoya Secretariat
(Inter Group Corp.)
[E-mail] info@robocup2017.org
[Tel] +81-52-581-3241
Orchid Building 8F, 2-38-2, Meieki, Nakamura-ku, Nagoya, 450-0002 JAPAN