RoboCup2017 Nagoya Japan(ロボカップ2017)



RoboCup2017 Nagoya Japan(ロボカップ2017)
RoboCup Soccer Small-Size League Fascinating Spectators with Speedy Performance Don’t Miss Watching Robots Exchanging Passes Smoothly and Moving in Coordination
Ms. Nakagawa is CEO of RT Corporation, which develops and sells robot hardware and software. Before launching her company, she worked as a research member of the Kitano Symbolic Systems Project under the Exploratory Research for Advanced Technology (ERATO) research funding program by the Japan Science and Technology Agency. Her career also includes the planning of the ASIMO exhibition at the National Museum of Emerging Science and Innovation. After learning about the 1st RoboCup, she competed in the championships a number of times, and then worked as a competition committee member. Currently, she serves as an advisor mainly for the small-size league.

Together with Nekotencho (cat shop manager), RIC90, a 120 cm-high, biped mascot robot developed by Ms. Nakagawa
RoboCup Leagues Using Actual Robots
When the RoboCup took place for the first time, the competition featured only soccer games, and they were categorized into the following two types: “actual leagues,” in which actual robots were used; and a “simulation league,” in which games were held on a virtual field created by computers. Today, the types of the games held at the RoboCup have diversified to include not only soccer, but also Rescue, simulating the use of robots at disaster sites; @Home, simulating the use of robots at households for living support; Industrial, simulating use at production plants; and Junior, for participants aged 19 or younger.
When the 1st RoboCup was held in 1997 in Nagoya, the actual leagues consisted of only the small-size league and the medium-size league. In those days, there was almost no other option than Micromouse as an event where small-size, autonomous robots moved around. Directly watching the small-size league, Ms. Nakagawa was attracted to the combination with image processing technology, and wanted to compete in the championships. Actually, she began to compete from the 2nd RoboCup.
The Three Important Technologies Necessary in the Small-size League
- You’re an advisor to the RoboCup soccer small-size league. Can you first tell us about the small-size league in general?
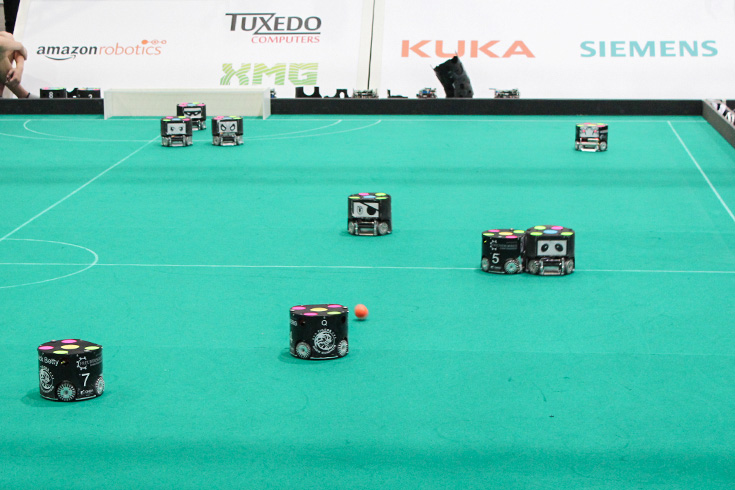
As the name suggests, the small-size league consists of soccer games played by relatively small robots compared with those used in the other leagues of the RoboCup. Initially, a 5-a-side game used to be played on a pitch the size of a ping-pong table, using an orange-colored golf ball. Currently, the pitch is the size of a dodgeball court, much bigger than a ping-pong table. In addition, the number of robots on each team has also increased, and a 6-a-side game is played, during which you can watch the robots maneuvering over the relatively large pitch. Moreover, the game rules have also changed a lot over the years. The main changes made during the past 20 years include the adoption of a system by which image processing is conducted by a central computer and the relevant data is distributed to each robot; the automation of the referee box, which communicates to the robots the start of the match and other information; and permission for only one robot from each team to be in their own goal area during the game. Thus, the game rules have become more detailed and stricter.
- The robots are not operated by humans, but consider and act on their own, right?
Yes. All the robots are autonomous type. Once a game starts, humans aren’t allowed to operate them at all. In the small-size league, the robots are cylindrical in shape, with a diameter of 18 cm or less and a height of 15 cm or less. Another characteristic is that a camera is installed above the field. Called the global camera, the device is used for image processing in real time, as well as for identifying the positions of the team robots and the ball in real time. In the other leagues, a vision system including a camera is mounted on each robot.
- It’s amazing enough that robots can play soccer autonomously, but the league also has detailed rules. This means that fairly high-level technologies are required, doesn’t it?
In the small-size league, roughly three types of technologies are important. The first is a high-level technology for developing robots themselves as hardware. The second is a decentralized technology for operating a number of robots simultaneously as a team. The third is image processing and other technologies for measuring objects in the real world and predicting what will happen next. Of the three, however, the image processing technology is not regarded as important as it used to be, since the system prepared by the league organizer is used today.
■Video for Your Reference
RoboCup Soccer Small-Size League
- Six robots move autonomously according to their tactics, don’t they?
Wireless communication technology, though this isn’t so visible, is also necessary. In the small-size league, many robots move on tires. Since the tires are made of rubber, the robots are insulated, preventing them from being properly grounded and sometimes causing wireless communication difficulties. In addition, radio waves are emitted here and there at the venue, frequently causing reception problems, such as generation of noise, and diffused reflection of radio waves. In particular, since a human body mainly consists of water, a large number of spectators often leads to more highly diffused reflection of radio waves than expected. It is often the case that this is behind the fact that robots didn’t move as expected during their games, even though they had moved well in the laboratory. So, technology for ensuring communications without fail even in such an environment is also important.
- So, it’s necessary to consider diffused reflection of radio waves, before developing robots. As a spectator, I feel that the most attractive feature of the small-size league is their speed of play.
I agree. Especially compared with the other leagues, the small-size league is outstanding in terms of speed. However, the league has many more attractive features, such as excellent formations like the ones you see in human soccer games, the actions of robots in coordination with one another to pass the ball after predicting the moves around them and the trajectory of the ball, and chip kicks for dodging opponents. So, you can fully enjoy the league in terms of tactics. We used to organize events where robots radio-controlled by humans played games. However, the robots today can judge and act so quickly that it would be difficult for robots controlled by humans to beat teams that compete in the RoboCup.
- So, each robot moves not blindly but in a well-organized way.
Of course. If the ball goes out of play, the robots wait until the ball is set properly once again. After receiving information on the judgment by the referee regarding which team should get the ball, they once again prepare to move according to their tactics. Everything is done autonomously. When the referee moves the ball, the robots begin to follow it quickly and simultaneously, which is fun to watch.
- I’m surprised just to hear that a multiple number of robots move in coordination with one another so speedily. That makes me feel that very high-level technologies are necessary in the small-size league. What about the situation of Japanese teams?
The league certainly requires high-level technologies. For example, a robot intercepts the ball that an opponent is trying to pass, and then passes it to a teammate after calculating the appropriate timing in real time. You know, this means that a multiple number of robots move in a decentralized way to make a tactical attack. So, the level of the technologies used for this is very high. In this environment, I feel that Japanese teams are doing well. Last year, in the small-size league, of the 24 teams that advanced to the world competition, four were Japanese teams, and this means that about 16% of all the teams at the world competition were Japanese teams. In the other leagues, of the 24 teams, there were only one or two Japanese teams, so I think that we can say the level of Japanese teams in the small-size league is high. Their level is so high that the small-size league of the RoboCup Japan Open often draws strong teams from abroad, even though it is a national event.
- Compared with the early RoboCups, which technology areas have you seen the most improvement in?
It has become possible to move on wheels in all directions. Also, the increase in the processing speeds of CPUs and cameras has enabled the robots to move much more quickly. In addition, since calculation speed has also increased considerably, image processing is incomparably better than what it used to be when I competed in the RoboCups. Specifically, using a system involving robot vision on the ceiling, each robot speedily and accurately judges the relationships between the positions of the goals, the ball, and the six robots on each team, namely a total of 12 robots on the field, before moving as a team. In that sense, I feel that the level of the technology of machine learning about formations and actions has also improved significantly.
The small league is becoming even more fun to watch as a game, and this means that the level of the technologies used has increased significantly. Basically, robots move with artificial intelligence. I often say that technologies that people don’t think are anything special are actually really great. If you watch some performance and feel that it is great, what makes the performance possible is the high-level technologies that uphold it.
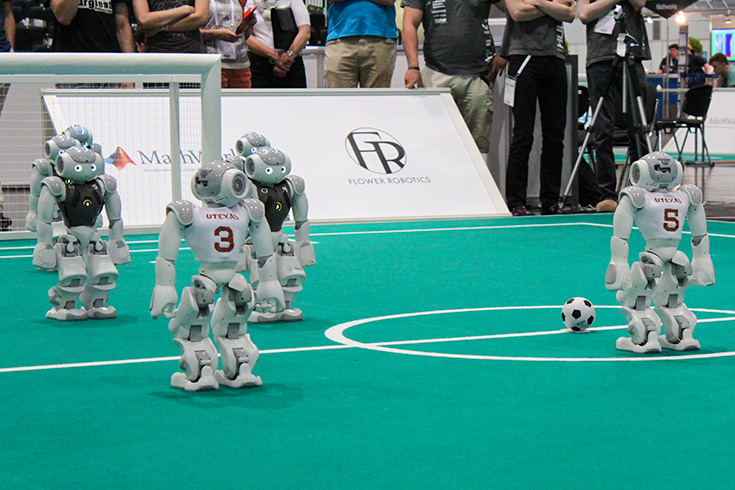
- What do you feel about the medium-size league and the standard platform league, in which NAO of SoftBank Robotics is used as the standard platform? Your company was the world’s first agency for NAO, wasn’t it?
If you have a slightly different perspective, you can enjoy NAO’s performance even more. It is unavoidable that leg-type robots move much more slowly than wheel-type robots. For a humanoid robot, NAO’s hardware is not that bad, and I feel that those concerned with the development of the robot are making rather strenuous efforts. At the RoboCup, if a robot waddles toward the ball and passes it in a lateral direction, it draws applause from spectators. If you see a robot fall down and try to stand up again, you’ll surely feel like cheering it on (laughs).
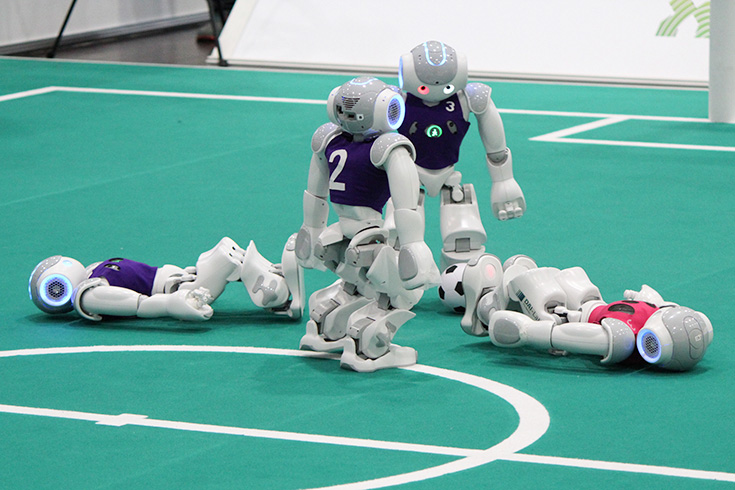
In the medium-size league as well, the robots move more slowly than those in the small-size league, but they are bigger, making their games more powerful and dynamic. If they bump into one another in an attempt to get the ball, a great cheer breaks out. The humanoid league is similar to the NAO league, and the robots move restlessly. I hope that you’ll cheer on them as well. In the @Home league, the robots need to perform some small tasks that we usually do at home, but the completion of such tasks is actually more difficult than expected. If a robot is ordered to fetch XX, the first question that the robot will have is what that XX is. I guess you will see through the robots how much information processing humans can actually do.
Amazon Robotics Technology Evolved Partly from the Small-size League
- Do you have any special memories or episodes of the small-size league?
It was probably 1997 or 1998, when I conceived the good idea of a roll-type kicker (kicking device). Although I spoke about it to my team member at that time in charge of hardware, he unfortunately couldn’t make it. So, I talked about it to Prof. Raffaello D’Andrea, who was at that time the leader of the team from Cornell University in the U.S., and he made one in time for the subsequent competition. Having increased the accuracy of ball handling (i.e. dribbling, passing, etc.), his team successfully won their league.
- If your team member in charge of hardware had made it, your team might have won the league.
No, I was happy with the result. One of the good points of the RoboCup is that “open source” and “open mind” have become a part of its culture. If some good technology is developed, everybody uses and refines it for the next competition. So in my case, it would be strange to insist that I deserved credit, since I just conceived the idea and didn’t implement it. I felt grateful that he had developed my idea to such a great level. However, I felt, at the same time, frustrated that I couldn’t make the hardware, and that’s why I’m now doing hardware as well after launching my company.
- Such an attitude is contributing to the development of society, isn’t it?
In cooperation with Kiva Systems (presently Amazon Robotics), Prof. Raffaello D’Andrea subsequently developed a distribution warehouse robot that can always identify the positions of a multiple number of robots and shelves, and lift and carry the necessary shelves without any mistakes. You can see that the technology enabling a multiple number of robots to move in coordination to pass the ball in the RoboCup soccer small-league has been applied to the system where robots move in a warehouse in a well-organized way without bumping into one another. It’s said that the technologies of Amazon Robotics came partly from the soccer league of the RoboCup.
- The RoboCup will be held in Nagoya again this summer. Could you give any advice to readers of this interview who might visit the event?
I recommend that everyone watch the RoboCup. I hope that the event will draw as many visitors as possible. Actually, I recommend watching the games on the second day. The final round is, of course, exciting, and the level of performance is very high. On the second day, however, you’ll be able to see very heated games for advancing to the final round, which will surely amaze you. In addition, it is often on the second day when innovative ideas and new perspectives are first seen. Also, since so many games take place on the second day, you can watch different types of leagues. Accordingly, many of those who know a lot about the RoboCup come to the venue on the second day. (This is her personal view.) Moreover, if you’re already interested in robots, it might be even more fun if you watch games imagining the fields where the technologies used for the games will be applied in the future. If you’re visiting the venue on business, please speak to team members without any hesitation while they aren’t playing games. At the simulation league, you’ll be able to see many hackers with outstanding skills, and also have a wide variety of information from abroad. In the actual leagues, I recommend the small-size league above all. Please come and watch!
[Profile of Ms. Yuki Nakagawa]
Completed the system engineering course of the Graduate School of Engineering, Hoesi University. Served as an assistant researcher at the Interdisciplinary Graduate School of Science and Engineering, Tokyo Institute of Technology; a research member of the Kitano Symbolic Systems Project under the Exploratory Research for Advanced Technology (ERATO) research funding program by the Japan Science and Technology Agency; the sub-leader of the exhibition and planning group of the National Museum of Emerging Science and Innovation; and a staff member at a robot-related company. Established RT Corporation and assumed the current position as a robot shop and manufacturer. In 2015, selected by Robohub (overseas robot information community) as one of the “25 Women in Robotics You Need to Know about” (FY 2015). Currently writing articles for Nikkei Robotics and ROBOCON Magazine.
Global Sponsors

Global Partner
Platinum Sponsors



Gold Sponsors







Silver Sponsors
















Bronze Sponsors






















Official Logistics Partner




RoboCup2017 Nagoya Secretariat
(Inter Group Corp.)
[E-mail] info@robocup2017.org
[Tel] +81-52-581-3241
Orchid Building 8F, 2-38-2, Meieki, Nakamura-ku, Nagoya, 450-0002 JAPAN